The least squares problems is to find an approximate solution
It is shown in Linear Algebra and its Applications that the approximate solution
In many real life applications, when a solution x to a system of equations of the form
A x = B
cannot be found (i.e. the system is inconsistent), it is possible that an approximate solution ![]() to the given system A x = B is enough.
to the given system A x = B is enough.
The least squares problems is to find an approximate solution ![]() such that the distance between the vectors A x and B given by
such that the distance between the vectors A x and B given by ![]() is the smallest.
is the smallest.
It is shown in Linear Algebra and its Applications that the approximate solution ![]() is given by the normal equation
is given by the normal equation
![]() where AT is the transpose of matrix A .
where AT is the transpose of matrix A .
Example 1
a) Show that the system A x = B with
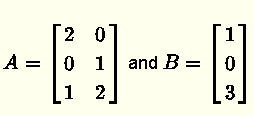 is inconsistent (system with no solutions).
is inconsistent (system with no solutions).
b) Find the least square solution to the inconsistent system A x = B .
c) Determine the least square error given by || A x = B || for the solution found in part b).
Solution to Example 1
a)
The system of equations to solve may be written in the form
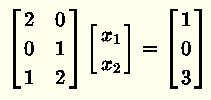
Write the above system in augmented matrix form
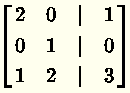
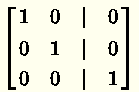
Row reduce (Gauss Jordan) the above augmented matrix
 \( \) \( \) \( \) \( \)
\( \) \( \) \( \) \( \)
The last row gives the equation \( 0 \cdot x_1 + 0 \cdot x_2 = 1 \) which has no solution and therefore the system is inconsistent.
b)
Let us find \( A^T \)
\( A^T =
\begin{bmatrix}
2 & 0 & 1\\
0 & 1 & 2
\end{bmatrix}
\)
Calculate \( A^T A \) and \( A^T B \)
\( A^T A =
\begin{bmatrix}
2 & 0 & 1\\
0 & 1 & 2
\end{bmatrix} \cdot
\begin{bmatrix}
2 & 0 \\
0 & 1 \\
1 & 2
\end{bmatrix} =
\begin{bmatrix}
5 & 2\\
2 & 5
\end{bmatrix}
\)
\( A^T B =
\begin{bmatrix}
2 & 0 & 1\\
0 & 1 & 2
\end{bmatrix} \cdot
\begin{bmatrix}
1 \\
0 \\
3
\end{bmatrix} =
\begin{bmatrix}
5\\
6
\end{bmatrix}
\)
Substitute \( A^T A \) and \( A^T B \) by their numerical values in the normal equation \( A^T A \hat x = A^T B \), we obtain the system
\(
\begin{bmatrix}
5 & 2\\
2 & 5
\end{bmatrix}
\cdot \hat x =
\begin{bmatrix}
5\\
6
\end{bmatrix}
\)
Solve the above to obtain
\( \hat x =
\begin{bmatrix}
\dfrac{13}{21}\\
\dfrac{20}{21}
\end{bmatrix}
\)
c)
\( A \cdot \hat x - B =
\begin{bmatrix}
2 & 0 \\
0 & 1 \\
1 & 2
\end{bmatrix}
\begin{bmatrix}
\dfrac{13}{21}\\
\dfrac{20}{21}
\end{bmatrix} -
\begin{bmatrix}
1 \\
0 \\
3
\end{bmatrix} =
\begin{bmatrix}
\dfrac{5}{21}\\
\dfrac{20}{21}\\
- \dfrac{10}{21}\end{bmatrix}
\)
\( || A \cdot \hat x - B || = \sqrt { (\dfrac{5}{21})^2 + (\dfrac{20}{21})^2 + (- \dfrac{10}{21})^2 } = \dfrac{5\sqrt{21}}{21} \approx 1.1 \)
Example 2
a) Show that the system \( A x = B \) with
\( A =
\begin{bmatrix}
1 & 0 & 1\\
2 & 0 & 2 \\
0 & -1 & 1\\
0 & -2 & 2
\end{bmatrix}
\) and \( B =
\begin{bmatrix}
2 \\
3 \\
4 \\
7
\end{bmatrix}
\)
is inconsistent.
b) Find the least square solution to the inconsistent system \( A x = B \).
c) Determine the least square error given by \( || Ax - B || \) for the solution found in part b).
Solution to Example 2
a)
The system of equations to solve may be written in the form
\[
\begin{bmatrix}
1 & 0 & 1\\
2 & 0 & 2 \\
0 & -1 & 1\\
0 & -2 & 2
\end{bmatrix}
\begin{bmatrix}
x_1\\
x_2 \\
x_3
\end{bmatrix}
=
\begin{bmatrix}
2 \\
3 \\
4 \\
7
\end{bmatrix}
\]
Write the above system in augmented matrix form
\(
\begin{bmatrix}
1 & 0 & 1 & |& 2\\
2 & 0 & 2 & | & 3 \\
0 & -1 & 1 & | & 4 \\
0 & -2 & 2 & | & 7
\end{bmatrix}
\)
Write in row reduced form (Gauss - Jordan)
\(
\begin{bmatrix}
1 & 0 & 1 & | & 0\\
0 & 1 & -1 & | & 0 \\
0 & 0 & 0 & | & 1 \\
0 & 0 & 0 & | & 0
\end{bmatrix}
\)
The third row gives the equation \( 0 \cdot x_1 + 0 \cdot x_2 + 0 \cdot x_3 = 1 \) which has no solution and therefore the system is inconsistent.
b)
Let us first find \( A^T \)
\( A^T =
\begin{bmatrix}
1 & 2 & 0 & 0\\
0 & 0 & -1 & -2\\
1 & 2 & 1 & 2
\end{bmatrix}
\)
Calculate \( A^T A \) and \( A^T B \)
\( A^T A =
\begin{bmatrix}
1 & 2 & 0 & 0\\
0 & 0 & -1 & -2\\
1 & 2 & 1 & 2
\end{bmatrix} \cdot
\begin{bmatrix}
1 & 0 & 1\\
2 & 0 & 2 \\
0 & -1 & 1\\
0 & -2 & 2
\end{bmatrix} =
\begin{bmatrix}
5 & 0 & 5\\
0 & 5 & -5\\
5 & -5 & 10
\end{bmatrix}
\)
\( A^T B =
\begin{bmatrix}
1 & 2 & 0 & 0\\
0 & 0 & -1 & -2\\
1 & 2 & 1 & 2
\end{bmatrix} \cdot
\begin{bmatrix}
2 \\
3 \\
4 \\
7
\end{bmatrix} =
\begin{bmatrix}
8\\
-18\\
26
\end{bmatrix}
\)
Substitute \( A^T A \) and \( A^T B \) by their numerical values in the normal equation \( A^T A \hat x = A^T B \), we obtain the system
\(
\begin{bmatrix}
5 & 0 & 5\\
0 & 5 & -5\\
5 & -5 & 10
\end{bmatrix}
\cdot \hat x =
\begin{bmatrix}
8\\
-18\\
26
\end{bmatrix}
\)
Write the above system in augmented matrix form
\(
\begin{bmatrix}
5 & 0 & 5 & | & 8\\
0 & 5 & -5 & | & -18\\
5 & -5 & 10 & | & 26
\end{bmatrix}
\)
Row reduce the above matrix
\(
\begin{bmatrix}
1 & 0 & 1 & | & \dfrac{8}{5}\\
0 & 1 & -1 & | & -\dfrac{18}{5}\\
0 & 0 & 0 & | & 0
\end{bmatrix}
\)
\( x_3 \) is the free variable.
second row gives: \( x_2 - x_3 = -\dfrac{18}{5} \) hence \( x_2 = x_3 -\dfrac{18}{5} \)
first row gives: \( x_1 + x_3 = \dfrac{8}{5} \) hence \( x_1 = - x_3 + \dfrac{8}{5} \)
The solution is given by
\( \hat x =
\begin{bmatrix}
-x_3 + \dfrac{8}{5}\\
x_3 -\dfrac{18}{5}\\
x_3
\end{bmatrix}
\)
with \( x_3 \in \mathbb{R} \)
Note that there is an infinite number of solutions to this least square problem.
c)
\( A \cdot \hat x - B =
\begin{bmatrix}
1 & 0 & 1\\
2 & 0 & 2 \\
0 & -1 & 1\\
0 & -2 & 2
\end{bmatrix}
\begin{bmatrix}
-x_3 + \dfrac{8}{5}\\
x_3 -\dfrac{18}{5}\\
x_3
\end{bmatrix} -
\begin{bmatrix}
2 \\
3 \\
4 \\
7
\end{bmatrix} =
\begin{bmatrix}
-\dfrac{2}{5}\\
\dfrac{1}{5}\\
-\dfrac{2}{5}\\
\dfrac{1}{5}
\end{bmatrix}
\)
\( || A \cdot \hat x - B || = \sqrt { (-\dfrac{2}{5})^2 + (\dfrac{1}{5})^2 + (-\dfrac{2}{5})^2 + (\dfrac{1}{5})^2} = \dfrac{\sqrt{2}}{5} \approx 0.63 \)
Note that the least square error \( || Ax - B || \) is constant and does not depend on \( x_3 \).