Base, Coordenadas y Dimensión de Espacios Vectoriales
Antes de definir formalmente la base de un espacio vectorial, damos ejemplos de base en el espacio bidimensional que quizás ya conozcas de la física y/o geometría analítica, lo que puede ayudarte a entender el concepto de base.
Definición de una Base para un Espacio Bidimensional Usando Ejes Rectangulares
Primero discutimos lo que sabemos sobre vectores en un espacio bidimensional tal como se usa en física y geometría analítica. El gráfico a continuación muestra el punto P , los vectores unitarios ortogonales .
i y j y el vector OP .
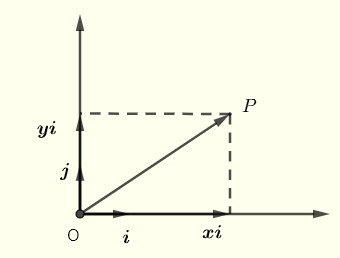
El vector OP puede expresarse como una combinación lineal de los vectores unitarios i y j tal que

 se llaman las coordenadas de OP con respecto a la base i,j.
se llaman las coordenadas de OP con respecto a la base i,j.
\( \) \( \) \( \)
Usando el paralelogramo (que aquí es un rectángulo), solo hay una forma de sumar dos vectores \( x \textbf i \) que es un múltiplo del vector \( \textbf i \) y \(y \textbf j \) que es un múltiplo del vector \( \textbf j \) para obtener el vector \( \textbf{OP} \)
Tome cualquier vector en el plano del sistema de coordenadas anterior y se puede representar de manera única como una suma de \( x \textbf i \) y \(y \textbf j \) siempre que los vectores \( \textbf i \) y \( \textbf j \) no sean paralelos (o linealmente dependientes).
Debido a que podemos expresar cualquier vector en el espacio bidimensional usando los vectores \( \textbf i \) y \( \textbf j \), estos dos vectores forman una base para el espacio bidimensional.
Generalización de la Definición de una Base para un Espacio Bidimensional
Ahora extendemos el concepto anterior de base usando vectores que no son necesariamente ortogonales (ver gráfico a continuación). Los vectores \( \textbf {v}_1 \) y \( \textbf {v}_2 \) no tienen que ser vectores unitarios u ortogonales.
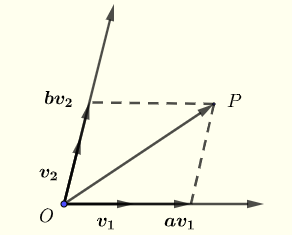
Usando el paralelogramo, hay una forma de sumar los vectores \( a \textbf {v}_1 \) y \( b \textbf {v}_2 \) múltiplos de \( \textbf {v}_1 \) y \( \textbf {v}_2 \) respectivamente para obtener el vector \( \textbf {OP} \). En otras palabras, hay una forma de escribir el vector \( \textbf{OP} \) como una combinación lineal de los vectores básicos \( \textbf {v}_1 \) y \( \textbf {v}_2 \).
De lo anterior, el vector \( \textbf{OP} \) puede escribirse como una combinación lineal de dos vectores cualesquiera \( \textbf{v}_1 \) y \( \textbf {v}_2 \) en el espacio bidimensional siempre que \( \textbf {v}_1 \) y \( \textbf {v}_2 \) no sean paralelos o linealmente dependientes.
\[ \textbf{OP} = a \textbf {v}_1 + b \textbf {v}_2 \]
\( a \) y \( b \) se llaman las coordenadas de \( \textbf {OP} \) con respecto a la base \( {\textbf {v}_1 , \textbf {v}_2} \).
Tome cualquier vector en el espacio bidimensional y se puede representar de manera única como una suma de \( a \textbf {v}_1 \) y \( b \textbf {v}_2 \) siempre que los vectores \( \textbf {v}_1 \) y \(\textbf {v}_2 \) no sean paralelos (o linealmente dependientes).
Los vectores \( v_1 \) y \( v_2 \) forman una base para el espacio bidimensional.
Generalización de la Definición de una Base para un Subespacio
Extendemos el concepto anterior de base de un sistema de coordenadas para definir una base para un espacio vectorial de la siguiente manera:
Si \( S = \{ \textbf {v}_1 ,\textbf {v}_2 , ... , \textbf {v}_n \}\) es un conjunto de vectores en un espacio vectorial \( V \), entonces \( S \) se llama una base para un subespacio \( V \) si
1) los vectores en \( S \) son linealmente independientes
2) los vectores en \( S \) generan el subespacio \( V \)
Dimensión de un Espacio Vectorial
Si \( S = \{ \textbf {v}_1 ,\textbf {v}_2 , ... , \textbf {v}_n \} \) es una base para el vector \( V \) entonces \( n \), que es el número de vectores en la base, es la dimensión del subespacio \( V \).
Definición de Coordenadas
Extendemos los conceptos anteriores de sistemas de coordenadas usando cualquier base para un subespacio de la siguiente manera:
Si \( S = \{ \textbf {v}_1 ,\textbf {v}_2 , ... , \textbf {v}_n \} \) es una base para el vector \( V \) y el vector \( \textbf {u} \) en \( V \) puede escribirse como una combinación lineal de los vectores en \( S \) de la siguiente manera
\[ \textbf {u} = r_1 \textbf {v}_1 + r_2 \textbf {v}_2 + ... + r_n \textbf {v}_n \]
entonces el vector \( [\textbf {u}]_S = \begin{bmatrix}
r_1 \\
r_2\\
. \\
. \\
r_n
\end{bmatrix}
\)
se llama el vector de coordenadas de \( u \) con respecto a la base \( S \).
Ejemplos con Soluciones
Ejemplo 1
¿Es el conjunto de vectores \( S = \left\{ \begin{bmatrix}
-1 \\
1 \\
0 \\
\end {bmatrix} ,
\begin{bmatrix}
1 \\
3 \\
-1 \\
\end {bmatrix} ,
\begin{bmatrix}
-1 \\
1 \\
0 \\
\end {bmatrix}
\right \}
\)
una base para un subespacio de \( \mathbb{R}^3 \)?
Solución al Ejemplo 1
Primero necesitamos determinar si los vectores en el conjunto \( S \) son linealmente independientes resolviendo para \(r_1, r_2 \) y \( r_3 \) la ecuación
\( r_1 \begin{bmatrix}
-1 \\
1 \\
0
\end {bmatrix} +
r_2\begin{bmatrix}
1 \\
3 \\
-1
\end {bmatrix} +
r_3 \begin{bmatrix}
-1 \\
1 \\
0
\end {bmatrix}
=
\begin{bmatrix}
0 \\
0 \\
0
\end {bmatrix} \)
La ecuación anterior en forma matricial está dada por
\(
\begin{bmatrix}
-1 &1&-1\\
1 &3&1 \\
0 &-1&0
\end{bmatrix}
\begin{bmatrix}
r_1 \\
r_2 \\
r_3
\end{bmatrix}
=
\begin{bmatrix}
0 \\
0 \\
0
\end {bmatrix}
\) (I)
La matriz aumentada del sistema homogéneo anterior es
\(
\begin{bmatrix}
-1 &1&-1&|&0\\
1 &3&1&|&0 \\
0 &-1&0&|&0
\end{bmatrix}
\)
Un sistema homogéneo de ecuaciones tiene una sola solución que es la solución trivial \( \begin{bmatrix}
0 \\
0 \\
0
\end {bmatrix} \)
y por lo tanto los vectores en el conjunto \( S \) son linealmente independientes o un número infinito de soluciones y los vectores en \( S \) son linealmente dependientes .
Escribamos la matriz aumentada anterior en forma escalonada por filas.
Sumar fila 1 y fila 2 y poner el resultado en fila 2
\(
\begin{bmatrix}
-1 &1&-1&|&0\\
0 &4&0&|&0 \\
0 &-1&0&|&0
\end{bmatrix}
\)
Sumar 4 veces la fila 3 y la fila 2 y poner el resultado en la fila 3
\(
\begin{bmatrix}
-1 &1&-1&|&0\\
0 &4&0&|&0 \\
0 &0&0&|&0
\end{bmatrix}
\)
Multiplicar fila 1 por -1 y fila 2 por 1/4 para obtener
\(
\begin{bmatrix}
1 & - 1 & 1&|&0\\
0 &1&0&|&0 \\
0 &0&0&|&0
\end{bmatrix}
\)
La matriz anterior tiene pivotes en las columnas 1 y 2, por lo tanto \( r_1 \) y \( r_2 \) son las variables básicas. Resolver en términos de \( r_3 \).
La última ecuación puede escribirse como
\( 0.r_3 = 0 \) , por lo tanto \( r_3 \) puede tomar cualquier valor real.
La segunda ecuación da
\( r_2 = 0 \)
La primera ecuación da
\( r_1 = - r_3 \)
La solución puede escribirse como
\(
\begin{bmatrix}
r_1 \\
r_2 \\
r_3
\end{bmatrix} = \begin{bmatrix}
-r_3 \\
0 \\
r_3
\end{bmatrix}
\)
Como \( r_3 \) puede tomar cualquier valor real, se pueden generar un número infinito de soluciones, diferentes de la solución trivial excepto la solución para \( r_3 = 0 \), y por lo tanto los vectores en \( S \) son linealmente dependientes , lo que significa que el conjunto de vectores en \( S \) no es una base para \( \mathbb{R}^3 \).
NOTAS
1) cuando la matriz de coeficientes es una matriz cuadrada como en el caso del ejemplo 1, podríamos haber usado el determinante de la matriz.
Usando la última fila de la matriz cuadrada en (I), el determinante es igual a cero y por lo tanto el sistema tiene un número infinito de soluciones diferentes y solo una de ellas es la solución trivial, por lo que podríamos haber llegado a la misma conclusión que arriba.
2) Se incluye una forma más sencilla de probar la linealidad de los vectores .
Ejemplo 2
Dada la base \( S = \left\{
\begin{bmatrix}
1 \\
0 \\
1 \\
0
\end{bmatrix}
,
\begin{bmatrix}
0 \\
2\\
1\\
0
\end{bmatrix}
,
\begin{bmatrix}
1 \\
1\\
-1\\
1
\end{bmatrix}
\right \}
\)
para un subespacio \( V \) y el vector \( \textbf u = \begin{bmatrix}
4 \\
-3 \\
0 \\
1
\end{bmatrix}
\)
en \( V \).
a) ¿Cuál es la dimensión del subespacio \( V \)?
b) Encuentre las coordenadas \( [\textbf u]_S \) usando la definición de coordenadas dada anteriormente.
Solución al Ejemplo 2
a)
La dimensión del subespacio \( V \) está dada por el número de vectores en su base; por lo tanto es igual a \( 3 \).
b)
Usando la definición anterior, las coordenadas \( [\textbf u]_S \) del vector \( \textbf {u} \) en la base \( S \) son las constantes \( r_1, r_2 , r_3 \) tales que
\[ \begin{bmatrix}
4 \\
-3 \\
0 \\
1
\end{bmatrix}
= r_1 \begin{bmatrix}
1 \\
0 \\
1 \\
0
\end{bmatrix} + r_2 \begin{bmatrix}
0 \\
2\\
1\\
0
\end{bmatrix} + r_3 \begin{bmatrix}
1 \\
1\\
-1\\
1
\end{bmatrix} \]
El sistema de ecuaciones anterior en forma de matriz aumentada se escribe de la siguiente manera
\(
\begin{bmatrix}
1 & 0 & 1 &|& 4\\
0 & 2 & 1 &|& -3 \\
1 & 1 & -1 &|& 0 \\
0 & 0 & 1 &|& 1
\end{bmatrix}
\)
Reducir por filas la matriz aumentada anterior
\(
\begin{bmatrix}
1 & 0 & 0 &|& 3\\
0 & 1 & 0 &|& -2 \\
0 & 0 & 1 &|& 1 \\
0 & 0 & 0 &|& 0
\end{bmatrix}
\)
La matriz anterior en forma reducida por filas da las soluciones: \( r_1 = 3, r_2 = -2 , r_3 = 1 \)
por lo tanto
\(
[\textbf u]_S =
\begin{bmatrix}
3\\
-2 \\
1 \\
\end{bmatrix}
\)
Ejemplo 3
Dada la base \( S_1 = \left\{
\begin{bmatrix}
1 \\
2
\end{bmatrix}
,
\begin{bmatrix}
-3 \\
1
\end{bmatrix}
\right\}
\)
y \( [\textbf u]_{S_1} = \begin{bmatrix}
-1 \\
2
\end{bmatrix}
\)
, encuentre \( [\textbf u]_{S_2} \) dada la base \( S_2 = \left\{
\begin{bmatrix}
0 \\
-1
\end{bmatrix}
,
\begin{bmatrix}
-1 \\
2
\end{bmatrix}
\right\}
\)
.
Solución al Ejemplo 3
Dado \( [\textbf u]_{S_1} \), \( \textbf u \) está dado por
\( \textbf u =
-1 \begin{bmatrix}
1 \\
2
\end{bmatrix}
+ 2
\begin{bmatrix}
-3 \\
1
\end{bmatrix}
=
\begin{bmatrix}
-7 \\
0
\end{bmatrix}
\)
Conociendo \( \textbf u \), ahora calculamos \( [\textbf u]_{S_2} = \begin{bmatrix}
r_1 \\
r_2
\end{bmatrix} \) usando la definición de las coordenadas dada anteriormente.
\(
\begin{bmatrix}
-7 \\
0
\end{bmatrix}
=
r_1 \begin{bmatrix}
0 \\
-1
\end{bmatrix}
+
r_2 \begin{bmatrix}
-1 \\
2
\end{bmatrix}
\)
Escriba el sistema anterior en forma de matriz aumentada
\(
\begin{bmatrix}
0 & -1 & | & -7\\
-1 & 2 & | & 0
\end{bmatrix}
\)
Reducir por filas
\(
\begin{bmatrix}
1 & - 2 & | & 0\\
0 & 1 & | & 7
\end{bmatrix}
\)
Resolver
\( r_2 = 7 \) y \( r_1 =14 \)
\( [\textbf u]_{S_2} = \begin{bmatrix}
14 \\
7
\end{bmatrix} \)
Ejemplo 4
Encuentre una base para el subespacio de \( R^3 \) generado por los vectores
\(
\begin{bmatrix}
1 \\
1 \\
2
\end{bmatrix}
\) ,
\(
\begin{bmatrix}
-1 \\
-2 \\
-7
\end{bmatrix}
\)
,
\(
\begin{bmatrix}
1 \\
0 \\
-3
\end{bmatrix}
\)
,
\(
\begin{bmatrix}
2 \\
0 \\
6
\end{bmatrix}
\)
Solución al Ejemplo 4
Comience creando una matriz cuyas columnas sean los vectores dados de la siguiente manera
\(
\begin{bmatrix}
1 & -1 & 1 & 2\\
1 & -2 & 0 & 0 \\
2 & -7 & -3 & 6
\end{bmatrix}
\)
Escriba la matriz en forma reducida por filas
\(
\begin{bmatrix}
1 & 0 & 2 & 0\\
0 & 1 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\)
Las columnas 1, 2 y 4 tienen un pivote y por lo tanto los vectores columna originales \(
\begin{bmatrix}
1 \\
1 \\
2
\end{bmatrix}
\) ,
\(
\begin{bmatrix}
-1 \\
-2 \\
-7
\end{bmatrix}
\)
,
\(
\begin{bmatrix}
2 \\
0 \\
6
\end{bmatrix}
\) correspondientes a estas columnas forman una base para el subespacio dado.
Más Referencias y Enlaces
- Álgebra Lineal - Preguntas con Soluciones
- Álgebra Lineal y sus Aplicaciones - 5ª Edición - David C. Lay , Steven R. Lay , Judi J. McDonald
- Álgebra Lineal Elemental - 7ª Edición - Howard Anton y Chris Rorres