A wheel touches a flat surface at point \( P \) assumed to be a fixed point on the wheel. As the wheel, with radius \( r \), rotates around its center on the flat surface (without sliding) , point \( P \) describes a curve called a cycloid . (see video below)
What the video shows is explained in Fig. 1 below: point \( P \) a fixed point on the wheel rotate around the center of the rotating wheel and move horizontally and vertically taking position \( P_1 \), \( P_2 \) ...
Fig.1 - Curve of Cycloid
In Fig.2 below, is shown point \( P \) afer a rotation of the wheel around its center \( C \) measured by angle \( t \) made by \( CP \) and \( CA \) such that \( CA \) is parallel to the \( y \) axis. Hence the components of vector \( CP \) are given by
\[ \vec {CP} = \; \left\lt r \cos \theta \; , \; r \sin \theta \; \right\gt \qquad (I) \]
where \( \theta \) is the angle in standard position.
We need to express the components of \( \vec {CP} \) in terms of angle \( t \) noting that
\( \theta = \dfrac{3\pi}{2} - t \)
Substitute \( \theta \) in (I) and write
\[ \vec {CP} = \; \left\lt r \; \cos \left(\dfrac{3\pi}{2} - t\right) \; , \; r \; \sin \left(\dfrac{3\pi}{2} - t\right) \; \right\gt \]
Use the trigonometric formulas \( \quad \cos(A - B) = \cos A \cos B + \sin A \sin B \) and \( \quad \sin(A - B) = \sin A \cos B - \cos A \sin B \) to expand the above and simplify using \( \cos \left(\dfrac{3\pi}{2}\right) = 0 \) and
\( \sin \left(\dfrac{3\pi}{2} \right) = -1 \) to obtain
\[ \vec {CP} = \left\lt \; - r \; \sin t \; , \; - r \; \cos t \; \right\gt \]
Fig.2 - Coordinates of a Point on a Wheel with Respect to the Center of the Wheel
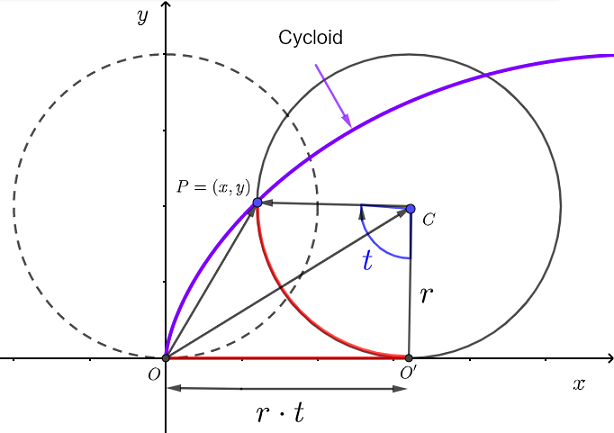
In order to find the equation of the cycloid, we need to find the coordinates of point \( P \) with respect to the origin \( O \) of the coordinate system.
Fig.3 - Coordinates of a Point on a Wheel with Respect to the Origin of the Origin of the System of Axes
After a rotation of angle \( t \), the \( x \) coordinate \( O O' \) of the center \( C \) of the circle is equal to the length of the arc \( O'P \) which is givn by
\[ r \; t \]
\( t \) in radians
The \( y \) coordinate \( O'C \) of the center \( C \) is equal to \( r \)
Hence the components of vector \( OC \) is given by
\[ \vec {OC} = \left\lt \; r \; t \; , \; r \; \right\gt \]
Vector \( OP \) is given as a sum of vectors as follows
\[ \vec {OP} = \vec {OC} + \vec {CP} \]
We substitute the components of vectors \( \vec {OC} \) and \( \vec {CP} \) found above to obtain
\[ \vec{OP} = \left\lt \; r \; t \; - r \; \sin t \; , \; r \; - r \; \cos t \right\gt \]
The coordinates of \( P \) are given by the parametric equations
\[
\begin{equation}
\left\{ \begin{aligned}
x(t) & = r(t - \sin t) \\\\
y(t) & = r(1 - \cos t)
\end{aligned} \right.
\end{equation}
\]
where \( t \) is the angle, in radians, through which the wheel has rotated around its center. Angle \( t \) is measured starting from the negative y axis in clockwise direction.
Length of a Cycle of a Cycloid
The length \( L \) of a curve whose equation is \( y = f(x) \) is given by
\[ L = \int_{x_1}^{x_2} \sqrt {1+\left(\dfrac{dy}{dx} \right)^2} dx \]
The derivative \( \dfrac{dy}{dx} \) of parametric equations is given by
\[ \dfrac{dy}{dx} = \dfrac{\dfrac{dy}{dt}}{\dfrac{dx}{dt}} \]
and
\( dx = \dfrac{dx}{dt} dt \) in the above to obtain
\[ L = \int_{t_1}^{t_2} \sqrt {1+\left( \dfrac{\dfrac{dy}{dt}}{\dfrac{dx}{dt}} \right)^2} \dfrac{dx}{dt} dt \qquad (II)\]
which may be written as
\[ L = \int_{t_1}^{t_2} \dfrac{1}{\left|\dfrac{dx}{dt}\right|} \sqrt { \left( \dfrac{dx}{dt}\right)^2 +\left( \dfrac{dy}{dt} \right)^2} \dfrac{dx}{dt} dt \]
One cycle of a cycloid corresponds to one rotation of the wheel and hence the limits integraion may be selected as \( t_1 = 0 \) and \( t_2 = 2 \pi \)
using the parametric equations of the cycloid, the drivatives with respect to \( t \) are given by
\[ \dfrac{dx}{dt} = r(1-\cos t ) \]
and
\[ \dfrac{dy}{dt} = r \sin t \]
and note that \( \dfrac{dx}{dt} = r(1-\cos t ) \) is non negative quantity and hence the simplification
\[ \left|\dfrac{dx}{dt}\right| = \dfrac{dx}{dt} \]
Substitute the above in \( II \) to simplify the formula for \( L \) as follows
\[ L = \int_{0}^{2 \pi} \sqrt { \left( \dfrac{dx}{dt}\right)^2 +\left( \dfrac{dy}{dt} \right)^2} dt \]
Substitute \( \dfrac{dx}{dt} \) and \( \dfrac{dy}{dt} \) by their expressions above and simplify to obtain
\[ L = \int_{0}^{2 \pi} \sqrt { \left( r(1-\cos t ) \right)^2 +\left( r \sin t \right)^2} dt \]
\( r \) is a constant and hence \( L \) may be written as
\[ L = r \int_{0}^{2 \pi} \sqrt { \left( 1 + \cos^2 t - 2 \cos t + \sin^2 t \right)} dt \]
Use the trigonometric identity \( \sin^2 t + \cos^2 t = 1 \) to simplify
\[ L = r \int_{0}^{2 \pi} \sqrt { 2 \left ( 1 - \cos t \right)} dt \]
Use the trigonometric identity \( \quad 1 - \cos t = 2 \sin^2 (t/2) \) and write
\[ L = r \int_{0}^{2 \pi} \sqrt { 4 \left ( \sin^2 (t/2) \right)} dt \]
which may be written as
\[ L = 2 r \int_{0}^{2 \pi} \left| \sin (t/2) \right| dt \]
\( \sin (t/2) \) is non negative on the interval \( [0 , 2 \pi ] \) and we therefore write
\[ L = 2 r \int_{0}^{2 \pi} \sin (t/2) dt \]
Evaluate the above integral
\[ L = 2 r \left[-2\cos \left(\frac{t}{2}\right)\right]_0^{2\pi} \]
\[ L = 4 r [- \cos \pi + \cos 0 ] \]
The length of one cycle of a cycloid is given by
\[ \boxed {L = 8 r } \]