Una rueda toca una superficie plana en el punto \( P \) que se supone es un punto fijo en la rueda. A medida que la rueda, con radio \( r \), gira alrededor de su centro sobre la superficie plana (sin deslizarse), el punto \( P \) describe una curva llamada cicloide . (ver video abajo)
Lo que muestra el video se explica en la Fig. 1 a continuación: el punto \( P \), un punto fijo en la rueda, gira alrededor del centro de la rueda y se mueve horizontal y verticalmente tomando la posición \( P_1 \), \( P_2 \) ...
Fig.1 - Curva de la Cicloide
En la Fig. 2 a continuación, se muestra el punto \( P \) después de una rotación de la rueda alrededor de su centro \( C \) medida por el ángulo \( t \) formado por \( CP \) y \( CA \) tal que \( CA \) es paralelo al eje \( y \). Por lo tanto, las componentes del vector \( CP \) están dadas por
\[ \vec {CP} = \; \left\lt r \cos \theta \; , \; r \sin \theta \; \right\gt \qquad (I) \]
donde \( \theta \) es el ángulo en posición estándar.
Necesitamos expresar las componentes de \( \vec {CP} \) en términos del ángulo \( t \) notando que
\( \theta = \dfrac{3\pi}{2} - t \)
Sustituya \( \theta \) en (I) y escriba
\[ \vec {CP} = \; \left\lt r \; \cos \left(\dfrac{3\pi}{2} - t\right) \; , \; r \; \sin \left(\dfrac{3\pi}{2} - t\right) \; \right\gt \]
Utilice las fórmulas trigonométricas \( \quad \cos(A - B) = \cos A \cos B + \sin A \sin B \) y \( \quad \sin(A - B) = \sin A \cos B - \cos A \sin B \) para expandir lo anterior y simplificar usando \( \cos \left(\dfrac{3\pi}{2}\right) = 0 \) y
\( \sin \left(\dfrac{3\pi}{2} \right) = -1 \) para obtener
\[ \vec {CP} = \left\lt \; - r \; \sin t \; , \; - r \; \cos t \; \right\gt \]
Fig.2 - Coordenadas de un Punto en una Rueda con Respecto al Centro de la Rueda
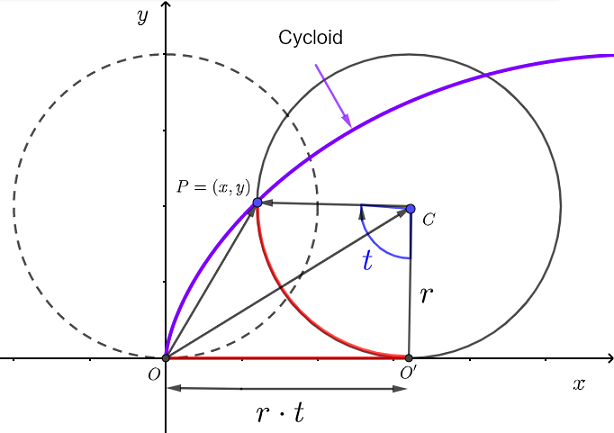
Para encontrar la ecuación de la cicloide, necesitamos encontrar las coordenadas del punto \( P \) con respecto al origen \( O \) del sistema de coordenadas.
Fig.3 - Coordenadas de un Punto en una Rueda con Respecto al Origen del Sistema de Ejes
Después de una rotación de ángulo \( t \), la coordenada \( x \) \( O O' \) del centro \( C \) del círculo es igual a la longitud del arco \( O'P \) que está dada por
\[ r \; t \]
\( t \) en radianes
La coordenada \( y \) \( O'C \) del centro \( C \) es igual a \( r \)
Por lo tanto, las componentes del vector \( OC \) están dadas por
\[ \vec {OC} = \left\lt \; r \; t \; , \; r \; \right\gt \]
El vector \( OP \) se da como una suma de vectores de la siguiente manera
\[ \vec {OP} = \vec {OC} + \vec {CP} \]
Sustituimos las componentes de los vectores \( \vec {OC} \) y \( \vec {CP} \) encontradas arriba para obtener
\[ \vec{OP} = \left\lt \; r \; t \; - r \; \sin t \; , \; r \; - r \; \cos t \right\gt \]
Las coordenadas de \( P \) están dadas por las ecuaciones paramétricas
\[
\begin{equation}
\left\{ \begin{aligned}
x(t) & = r(t - \sin t) \\\\
y(t) & = r(1 - \cos t)
\end{aligned} \right.
\end{equation}
\]
donde \( t \) es el ángulo, en radianes, a través del cual la rueda ha rotado alrededor de su centro. El ángulo \( t \) se mide comenzando desde el eje y negativo en el sentido de las agujas del reloj.
Longitud de un Ciclo de una Cicloide
La longitud \( L \) de una curva cuya ecuación es \( y = f(x) \) está dada por
\[ L = \int_{x_1}^{x_2} \sqrt {1+\left(\dfrac{dy}{dx} \right)^2} dx \]
La derivada \( \dfrac{dy}{dx} \) de ecuaciones paramétricas está dada por
\[ \dfrac{dy}{dx} = \dfrac{\dfrac{dy}{dt}}{\dfrac{dx}{dt}} \]
y
\( dx = \dfrac{dx}{dt} dt \) en lo anterior para obtener
\[ L = \int_{t_1}^{t_2} \sqrt {1+\left( \dfrac{\dfrac{dy}{dt}}{\dfrac{dx}{dt}} \right)^2} \dfrac{dx}{dt} dt \qquad (II)\]
que puede escribirse como
\[ L = \int_{t_1}^{t_2} \dfrac{1}{\left|\dfrac{dx}{dt}\right|} \sqrt { \left( \dfrac{dx}{dt}\right)^2 +\left( \dfrac{dy}{dt} \right)^2} \dfrac{dx}{dt} dt \]
Un ciclo de una cicloide corresponde a una rotación de la rueda y, por lo tanto, los límites de integración pueden seleccionarse como \( t_1 = 0 \) y \( t_2 = 2 \pi \)
usando las ecuaciones paramétricas de la cicloide, las derivadas con respecto a \( t \) están dadas por
\[ \dfrac{dx}{dt} = r(1-\cos t ) \]
y
\[ \dfrac{dy}{dt} = r \sin t \]
y observe que \( \dfrac{dx}{dt} = r(1-\cos t ) \) es una cantidad no negativa y, por lo tanto, la simplificación
\[ \left|\dfrac{dx}{dt}\right| = \dfrac{dx}{dt} \]
Sustituya lo anterior en \( II \) para simplificar la fórmula para \( L \) de la siguiente manera
\[ L = \int_{0}^{2 \pi} \sqrt { \left( \dfrac{dx}{dt}\right)^2 +\left( \dfrac{dy}{dt} \right)^2} dt \]
Sustituya \( \dfrac{dx}{dt} \) y \( \dfrac{dy}{dt} \) por sus expresiones anteriores y simplifique para obtener
\[ L = \int_{0}^{2 \pi} \sqrt { \left( r(1-\cos t ) \right)^2 +\left( r \sin t \right)^2} dt \]
\( r \) es una constante y, por lo tanto, \( L \) puede escribirse como
\[ L = r \int_{0}^{2 \pi} \sqrt { \left( 1 + \cos^2 t - 2 \cos t + \sin^2 t \right)} dt \]
Use la identidad trigonométrica \( \sin^2 t + \cos^2 t = 1 \) para simplificar
\[ L = r \int_{0}^{2 \pi} \sqrt { 2 \left ( 1 - \cos t \right)} dt \]
Use la identidad trigonométrica \( \quad 1 - \cos t = 2 \sin^2 (t/2) \) y escriba
\[ L = r \int_{0}^{2 \pi} \sqrt { 4 \left ( \sin^2 (t/2) \right)} dt \]
que puede escribirse como
\[ L = 2 r \int_{0}^{2 \pi} \left| \sin (t/2) \right| dt \]
\( \sin (t/2) \) es no negativo en el intervalo \( [0 , 2 \pi ] \) y, por lo tanto, escribimos
\[ L = 2 r \int_{0}^{2 \pi} \sin (t/2) dt \]
Evalúe la integral anterior
\[ L = 2 r \left[-2\cos \left(\frac{t}{2}\right)\right]_0^{2\pi} \]
\[ L = 4 r [- \cos \pi + \cos 0 ] \]
La longitud de un ciclo de una cicloide está dada por
\[ \boxed {L = 8 r } \]